

4 min read
Etter å ha utforsket hvorfor robotisering lønner seg og de grunnleggende prinsippene for robotisert avfallssortering, skal vi nå dykke dypere inn i hjertet av teknologien. Det kritiske samspillet mellom deteksjonssystemer og manipulatorer er nemlig det som virkelig skiller effektive avfallsroboter fra mindre suksessfulle løsninger.
Den kritiske forbindelsen
Tenk på deteksjonssystemet som robotens "øyne og hjerne", mens manipulatoren er dens "hender". For at en avfallsrobot skal fungere optimalt, må det være perfekt koordinasjon og kommunikasjon mellom disse systemene. La oss se på hvordan denne prosessen faktisk foregår.
Fra observasjon til handling: Dataflytens reise
1. Deteksjon og materialidentifikasjon
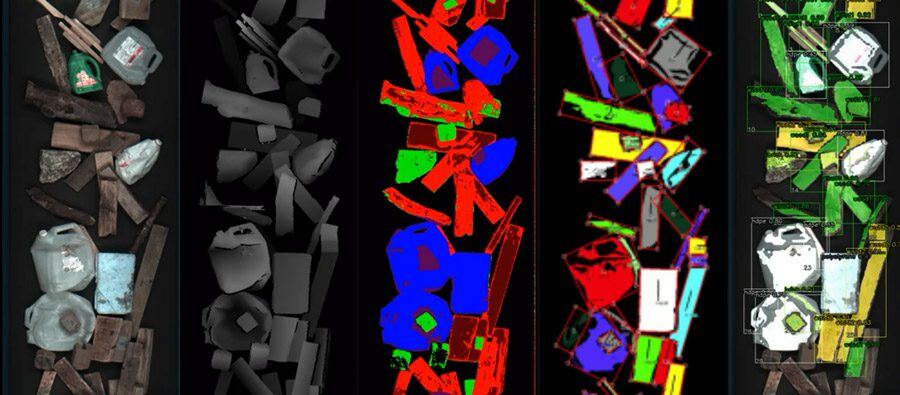
Alt starter med avanserte sensorsystemer som scanner avfallsstrømmen:
- Multisensorsystemer kombinerer ulike typer sensorer for å skape en komplett forståelse av objektene på transportbåndet
- Hyperspektrale kameraer identifiserer materialtypene ved å analysere materialets unike spektralsignaturer
- 3D-kameraer kartlegger objektenes nøyaktige posisjon, høyde og form
- Fargesensorer bidrar med visuell informasjon som supplerer de andre sensorene
Disse dataene prosesseres av AI-algoritmer som kan identifisere materialer med opptil 99% nøyaktighet.
2. Databehandling og beslutninger
Når materialene er identifisert, må systemet ta flere kritiske beslutninger på millisekunder:
- Hvilke objekter skal plukkes (basert på materialprioritet)?
- I hvilken rekkefølge bør de plukkes (optimalisert for effektivitet)?
- Hvordan skal hvert objekt gripes (avhengig av størrelse, form og materiale)?
- Hvor skal objektet plasseres etter plukking?
Dette krever kraftig databehandling i sanntid, og her kommer den spesialiserte AI-logikken inn.
3. Koordinatkonvertering og romlig kalibrering
En kritisk og ofte oversett del av prosessen er konverteringen fra kameraets koordinatsystem til robotens koordinatsystem:
Nøyaktig kalibrering mellom deteksjonssystem og robot er avgjørende. En feilmargin på bare noen få millimeter kan bety forskjellen mellom en vellykket plukk og et bomforsøk.
Moderne systemer bruker avanserte algoritmer for:
- Automatisk kalibrering mellom kamera og robot
- Kompensasjon for transportbåndets bevegelse
- Justering for variasjoner i objektenes høyde
- Tilpasning til endringer i lysforhold og miljøfaktorer
4. Kommandoer til manipulatoren
Når beslutningene er tatt, sendes presise instruksjoner til manipulatoren:
- Nøyaktige koordinater for hvor objektet befinner seg
- Informasjon om optimal gripevinkel og strategi
- Kraft- og hastighetsparametere tilpasset materialtype
- Destinasjonskoordinater for hvor objektet skal plasseres
5. Feedback og kontinuerlig læring
Det som virkelig skiller moderne systemer fra eldre løsninger er den kontinuerlige feedback-sløyfen:
- Resultatet av hver plukkeoperasjon registreres
- Vellykkede og mislykkede plukk analyseres
- Systemet lærer og justerer seg kontinuerlig
- Algoritmer forbedres over tid gjennom maskinlæring
Utfordringer ved deteksjon i komplekse avfallsstrømmer
Avfall er en av de mest krevende miljøene for robotsystemer av flere grunner:
Materialvariasjon og overlapping
Objekter i avfallsstrømmer kommer i uendelige variasjoner av størrelse, form og tilstand. De er ofte stablet oppå hverandre eller delvis skjult.
Skiftende lysforhold
Avfallsanlegg har varierende lysforhold som kan påvirke kamerabaserte systemer.
Tilsmussing og støv
Sensorer må fungere pålitelig selv når de er utsatt for støv og smuss.
Varierende transportbåndhastighet
Transportbånd kan endre hastighet eller ha ujevn bevegelse som må kompenseres for.
Hvordan moderne systemer løser utfordringene
Avanserte deteksjonssystemer håndterer disse utfordringene med flere strategier:
Multispektral analyse
Ved å analysere flere bølgelengder av lys kan systemet "se gjennom" støv og identifisere materialer selv under vanskelige forhold.
Adaptive algoritmer
AI-systemer justerer seg automatisk til endrede lysforhold og miljøvariabler.
Robuste sensoroppsett
Flere redundante sensorer sikrer pålitelig deteksjon selv om enkelte sensorer blir tilsmusset.
Avansert bildebehandling
Algoritmer for segmentering kan skille mellom overlappende objekter og identifisere objekter som er delvis synlige.

Ulike manipulatorløsninger for samme deteksjonssystem
En viktig innsikt om moderne avfallssorteringsteknologi er at det ikke nødvendigvis er likhetstegn mellom AI-basert deteksjon og robotarmer. Samme avanserte deteksjonssystem med AI kan faktisk styre flere ulike typer manipulatorer:
Tradisjonelle luftdyssystemer
En av de mest brukte manipulatorene i avfallssortering er faktisk ikke en robotarm i det hele tatt, men et system av luftdyser:
AI-baserte kamerasystemer kan benyttes til å styre nøyaktig de samme luftdyssystemene som tradisjonelle optiske sorteringsmaskiner har brukt i årevis. Forskjellen er at AI kan gjøre identifikasjonen av materialer mye mer nøyaktig og fleksibel.
Slik fungerer det:
- Materialer identifiseres av AI-systemet på transportbåndet
- Når materialet når enden av transportbåndet, aktiveres presise luftdyser
- Luftstrålen blåser materialet over en skillekant til riktig fraksjon
- Systemet kan håndtere høy hastighet og er ideelt for lettere materialer
En viktig begrensning ved luftdyssystemer er at de typisk kun kan sortere i to fraksjoner ved hvert sorteringspunkt – objektet blåses enten over kanten eller fortsetter på båndet. Disse systemene kan håndtere mange små objekter raskt, men for å sortere i flere enn to fraksjoner må man sette opp flere sorteringssteg i serie.
Dette står i motsetning til robotarmer, som kan sortere i opptil 6 ulike fraksjoner på samme tid, men med en lavere hastighet når det gjelder antall objekter per minutt.
Mekaniske avskyvere
En annen manipulatortype som kan styres av samme AI-system:
- Raske, mekaniske "fingre" som skyver utvalgte materialer til siden
- Velegnet for mellomstore objekter på høyhastighets transportbånd
- Kan håndtere mer varierende former enn luftdyssystemer
- Krever mindre energi enn kontinuerlige luftdyser
- Krever at objektene kommer etter hverandre på transportbåndet og ikke overlapper
Denne typen manipulatorer er kjent fra f.eks. posesortering flere steder i Norge.
Robotarmer med ulike gripeenheter
Når større objekter skal sorteres eller når høy presisjon kreves:
- Robotarmer med spesialiserte gripere kan plukke objekter direkte fra transportbåndet
- Ideelle for tyngre materialer og irregulære former
- Kan utføre mer komplekse bevegelser og sorteringsmønstre
- Samme AI-system kan styre flere ulike robotarmer samtidig

Kombinerte systemer
I mange moderne anlegg brukes faktisk en kombinasjon:
- Luftdyser for små, lette objekter (plastflak, papirfragmenter)
- Robotarmer for større, tyngre objekter (trevirke, metall, betong)
- Alle styrt av samme AI-baserte deteksjonssystem
Sammenfatning av samspillet
Som vi har sett, handler effektiv avfallssortering ikke bare om å ha den mest avanserte deteksjonsteknologien eller den mest sofistikerte robotarmen, men om det sømløse samspillet mellom disse komponentene.
Det viktigste å forstå er at hjernen bak sorteringen – AI-systemet og kameraene – kan kobles til ulike "hender" avhengig av hva som skal sorteres. Du kan bruke samme intelligente deteksjonsteknologi til å styre alt fra enkle luftdyser til avanserte robotarmer. I neste artikkel vil vi gå nærmere inn på disse ulike manipulatortypene og utforske hvilke faktorer som avgjør valget av riktig løsning for ulike sorteringsoppgaver.
Balansen mellom hastighet og presisjon
Et nøkkelaspekt ved samspillet mellom deteksjon og manipulasjon er balansen mellom hastighet og presisjon:
- Høy hastighet øker gjennomstrømningen, men kan redusere nøyaktigheten
- Høy presisjon gir bedre sorteringsresultat, men kan redusere kapasiteten
- Optimal balanse varierer avhengig av materialtype og krav til renhet
Moderne systemer løser dette dilemmaet ved å:
- Justere hastighet dynamisk basert på materialtype
- Prioritere presisjon for høyverdige materialer
- Optimalisere plukkerekkefølge for å maksimere både hastighet og presisjon
- Bruke parallelle roboter for å oppnå både høy kapasitet og presisjon
Fremtiden for deteksjon-manipulasjon-samspill
Teknologien fortsetter å utvikle seg, og vi ser flere spennende trender:
Kunstig intelligens på edge-nivå
AI-prosessering flytter nærmere sensorene, noe som reduserer latenstid og øker responsivitet.
Adaptiv gripestrategier
Neste generasjons roboter justerer automatisk gripestrategi basert på real-time deteksjonsdata.
Samarbeidende robotsystemer
Multiple roboter som kommuniserer seg imellom for å optimalisere sorteringen på systemnivå.
Forbedret taktil feedback
Manipulatorer med berøringssensorer som gir ytterligere data tilbake til systemet.
Oppsummering og veien videre
Samspillet mellom deteksjon og manipulasjon er den kritiske faktoren som bestemmer suksessen til et robotisert sorteringssystem. Når begge systemene er nøyaktig kalibrert og integrert, oppnås en synergieffekt der helheten blir større enn summen av delene.
I neste artikkel vil vi se nærmere på de ulike typene manipulatorer som brukes i avfallssortering, fra robotarmer til luftdyssystemer, og fordelene og ulempene med hver enkelt type.
Likte du denne artikkelen?
Du kan abonnere på bloggen vår og få flere artikler som denne rett i innboksen din!