

4 min read
I de foregående artiklene har vi sett på hvorfor robotisert avfallssortering er fordelaktig og hvordan deteksjonssystemer identifiserer ulike materialer. Vi har også utforsket det viktige samspillet mellom deteksjon og manipulasjon. Nå skal vi fokusere på selve "hendene" i systemet – de ulike manipulatorene som fysisk utfører sorteringsarbeidet.
Oversikt over ulike manipulatortyper
Når det kommer til robotisert avfallssortering, finnes det hovedsakelig to dominerende manipulatortyper, med noen få alternative løsninger:
- Industrielle robotarmer - allsidige og tilpasningsdyktige
- Luftdysesystemer - høyhastighets sortering av lettere materialer
Mange ser på "robotsortering" som et alternativ til eksisterende optiske sorteringssystemer også kjent som "NIR-lesere" og liknende. Egentlig er dette to sider av samme sak - man har et optisk deteksjonssystem som enten bygger på et enkeltprinsipp som spektrometri/NIR, eller kamera, eller begge deler (som de fleste "optiske sorteringsmaskiner" er i dag, for eksempel Tomra Autosort), og man har en manipulator.
I tradisjonelle optiske sorteringsmaskiner bruker man stort sett rekker med tettsittende luftdyser som blåser ønsket eller uønsket materiale ut fra hovedstrømmen på enden av et transportbånd, mens i "robotsortering" bruker man de samme sensordataene, ofte utvidet med kunstig intelligens, til å gi koordinater til en robotarm som plukker ut objektet i stedet.
I tillegg finnes det også noen andre alternativer som mekaniske eller luftbasere avskyvere. La oss se nærmere på hovedalternativene:
Industrielle robotarmer
Den allsidige arbeidshesten
Industrielle robotarmer er den mest allsidige løsningen for avfallssortering. Disse kommer i mange varianter, inkludert:
- Artikulerte robotarmer - med 6 eller flere akser som gir stor bevegelsesfrihet
- Delta-roboter - svært raske, ideelle for lette materialer
- Kartesiske roboter - beveger seg langs tre lineære akser (X, Y, Z), noe som gir enkel styring men begrenset hastighet og fleksibilitet sammenlignet med artikulerte og delta-roboter.
Fordeler med kommersielle robotarmer
En av de største fordelene med kommersielle robotarmer er deres historie og utbredelse:
Velprøvd og moden teknologi Industriroboter har vært i bruk i produksjonsindustrien i flere tiår. Robotprodusenter som FANUC, ABB, KUKA og Universal Robots har levert hundretusenvis av enheter til krevende industrimiljøer. Dette betyr at:
- Teknologien er velutprøvd og robust
- Påliteligheten er dokumentert (ofte 100.000+ timer mellom feil)
- Grunnleggende problemer er for lengst løst
- Svært begrenset vedlikeholdsbehov
Omfattende service- og supportnettverk Etablerte robotprodusenter har:
- Globale servicenettverk med lokale teknikere
- Rask tilgang på reservedeler
- Omfattende dokumentasjon og brukerstøtte
- Standardiserte opplæringsprogrammer
Spesialisering og fokus Ved å benytte kommersielle robotarmer kan leverandører av avfallssorteringssystemer:
- Fokusere på det de er best på: deteksjonssystemer og avfallshåndtering
- Benytte robotprodusentenes ekspertise for manipulatordelen
- Raskere utvikle og implementere komplette løsninger
- Unngå å "finne opp hjulet på nytt"
Spesialiserte gripeenheter for avfall
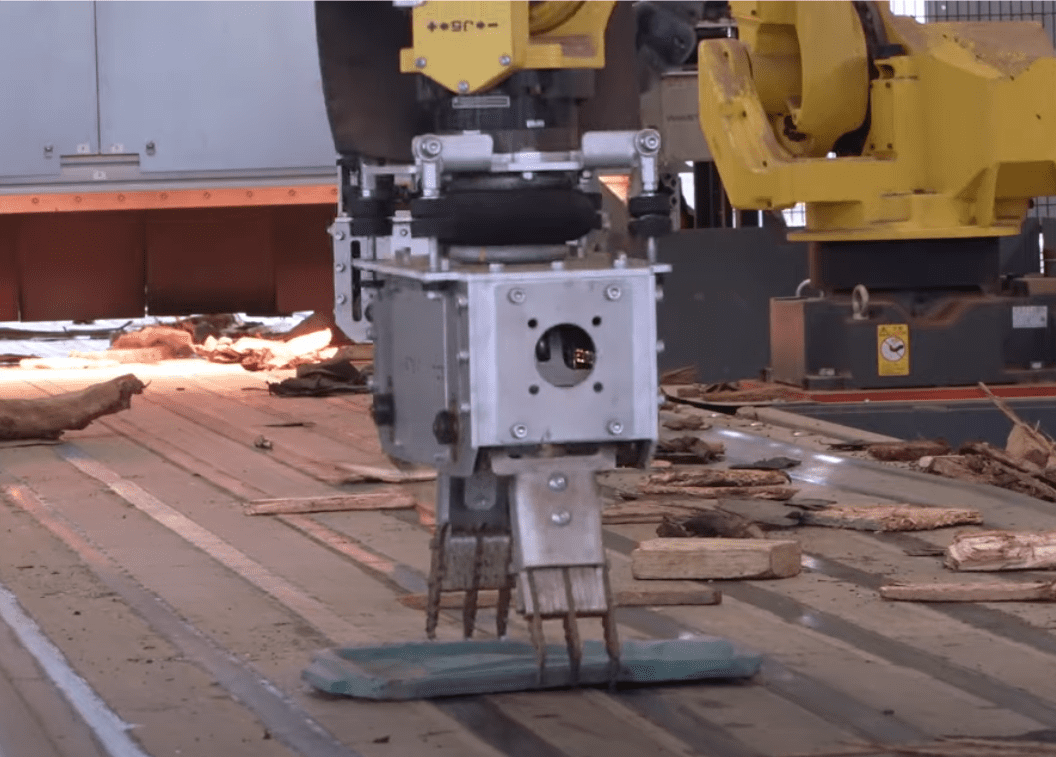
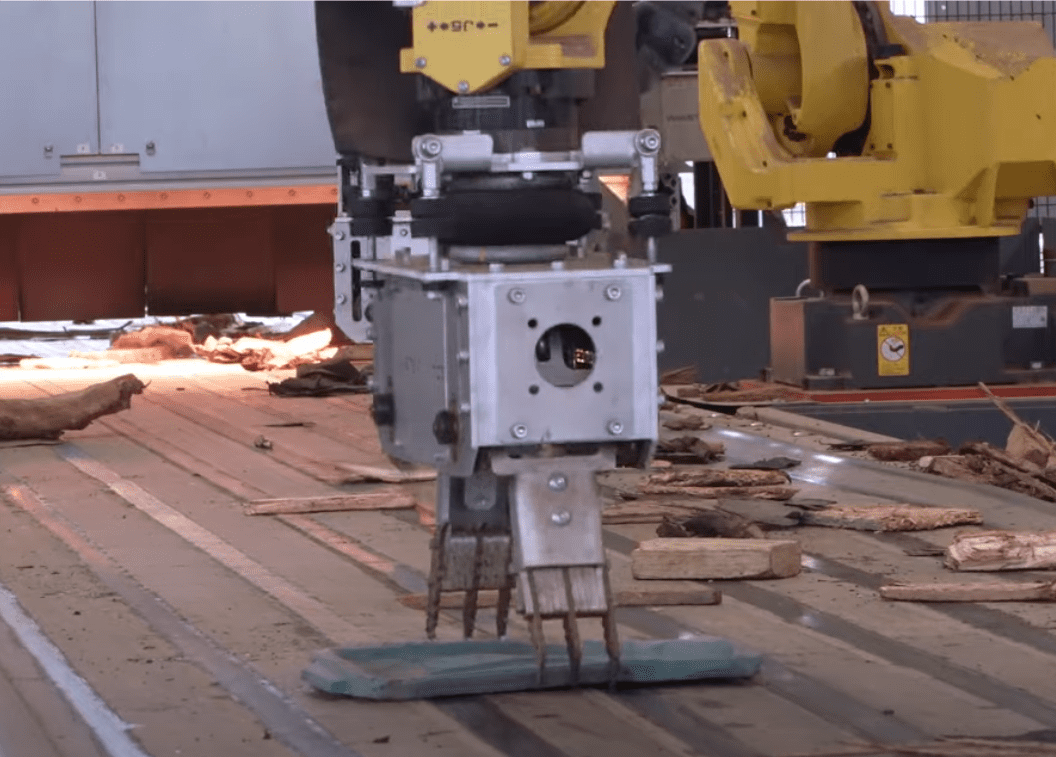
Det som virkelig gjør industrielle robotarmer effektive for avfallssortering er de spesialiserte griperne som monteres på enden av roboten. Disse gripeenhetene er et område med betydelig fokus og innovasjon i bransjen.
Varianter tilpasset ulike materialtyper:
- Gripere for tunge materialer som håndterer objekter opptil 20 kg og er ideelle for trevirke, betong og store metallobjekter
- Gripere for poser og myke materialer spesialdesignet for å håndtere plastposer, film og fleksible materialer
- Vakuumbaserte gripere for lettere materialer som plastflasker, papir og flate gjenstander
- Presisjonsgripere for metall som håndterer verdifulle metallkomponenter, inkludert "meatballs" (kobberklumper)
Tilnærminger til griperutvikling:
- Hyllevareløsninger - standardiserte gripere som kan tilpasses ulike robotmodeller
- Skreddersydde gripere - spesialutviklet for bestemte materialtyper og avfallsstrømmer
- Modulære systemer - basisgripere med utskiftbare komponenter for ulike materialer
De ledende leverandørene av robotsorteringssystemer prioriterer griperutvikling like høyt som deteksjonsteknologi. Dette er fordi effektiv sortering krever både nøyaktig deteksjon og pålitelig manipulasjon – begge er like viktige for suksess.
Presisjon gir systemeffektivitet: En særlig fordel med moderne gripeteknologi er nøyaktigheten i plukkoperasjonen. Avanserte gripere kan isolere og plukke enkeltgjenstander uten å forstyrre omkringliggende materialer på transportbåndet. Dette gir en betydelig systemfordel: man kan plassere flere robotarmer i serie på samme transportbånd uten behov for mellomliggende kamerasystemer. Ettersom hvert plukk utføres presist, forblir de øvrige materialene i sin opprinnelige posisjon, og alle roboter kan benytte dataene fra det innledende deteksjonssystemet.
Andre manipulatortyper
Selv om industrielle robotarmer og luftdyssystemer dominerer markedet for avfallssortering, finnes det også andre løsninger som kan nevnes for fullstendighetens skyld:
Kartesiske roboter
Enkelte leverandører har utviklet egne kartesiske roboter som beveger seg langs tre rettvinklede akser (X, Y og Z) – litt som en 3D-printer eller en CNC-maskin. Denne strukturen er mekanisk enklere enn en artikulert robotarm, noe som kan gi lavere produksjonskostnad. Til gjengjeld gir den mer begrenset bevegelsesfrihet og rekkevidde, og man går glipp av fordelene ved å bruke en standardisert industrirobot med tilhørende service- og supportnettverk.
Mekaniske avskyvere
Mekaniske avskyvere – enkle skyveenheter eller "fingre" – brukes blant annet i posesorteringssystemer der fargede poser skal skilles fra hverandre. Slike systemer fungerer, men forutsetter at materialet mates inn strukturert og forutsigbart – typisk ett objekt om gangen. Dette krever ofte mange parallelle, smale transportbånd for å oppnå tilstrekkelig kapasitet, noe som gjør totalløsningen plasskrevende og kostbar. Med moderne robotarmer og AI-basert deteksjon kan man løse tilsvarende oppgaver med langt enklere og rimeligere infrastruktur.
Valg av riktig manipulator til oppgaven
Når man skal velge mellom robotarmer og luftdyssystemer, er det flere faktorer som spiller inn:
Materialstørrelse og vekt
- Lette, flate materialer → Luftdyssystemer er ofte optimale
- Tunge, store objekter → Robotarmer med kraftige gripere er nødvendige
Produksjonshastighet
- Svært høy hastighet for små objekter → Luftdyser kan håndtere hundrevis av objekter per minutt
- Moderat hastighet for større objekter → Robotarmer med 20-60 plukk per minutt
Antall fraksjoner
- To fraksjoner → Luftdyssystemer kan være tilstrekkelige
- Flere fraksjoner (opptil 6) → Robotarmer gir best fleksibilitet
Materialverdi og renhetskrav
- Høyverdige materialer med strenge renhetskrav → Presise robotarmer
- Bulk-materialer med moderate renhetskrav → Luftdyssystemer
- Forhåndssortering eller grovsortering → Luftdyssystemer
Kombinerte løsninger: Det beste fra begge verdener
I moderne anlegg ser vi stadig oftere kombinerte løsninger som utnytter styrkene til både robotarmer og luftdyssystemer:
Flertrinnssystemer
- Luftdyser for innledende grovsortering i to hovedfraksjoner
- Robotarmer for finsortering i flere underfraksjoner
Parallelle systemer
- Ulike manipulatortyper håndterer forskjellige materialstrømmer samtidig
- Robotarmer for høyverdige materialer
- Luftdyser for høyvolum, lette materialer
Tilpassede løsninger Med moderne AI-baserte deteksjonssystemer kan samme "hjerne" styre ulike "hender". Dette gir mulighet for å skreddersy manipulatorløsninger basert på spesifikke behov og materialer, uten å måtte bytte ut hele systemet.
Fremtidens manipulatorer
Utviklingen går raskt, og vi ser allerede noen tydelige trender. Gripere med innebygde sensorer kan tilpasse gripekraft og strategi basert på objektet som plukkes – noe som øker andelen vellykkede plukk. Kanskje mest spennende er potensialet for å bruke AI til å trene opp selve manipulatoren – ikke bare til å identifisere objekter, men til å utvikle avanserte bevegelsesmønstre som sikrer at objektet faktisk ender opp der det skal. For eksempel kan en lang gjenstand roteres slik at den slippes gjennom traktåpningen på langs i stedet for å sette seg fast på tvers.
Det er verdt å understreke at robotarmer og luftdysesystemer ikke konkurrerer direkte – de har ulike styrker. Luftdyser er overlegne når store mengder småbiter skal deles i to fraksjoner med høy hastighet. Robotarmer kommer til sin rett der objektene er større eller tyngre, eller der man ønsker å sortere ut flere fraksjoner samtidig – for eksempel ved kvalitetssortering av en allerede relativt ren fraksjon der uønsket materiale skal fordeles i flere kategorier.
Oppsummering og veien videre
Valget av riktig manipulator er avgjørende for et effektivt avfallssorteringssystem. Industrielle robotarmer tilbyr allsidighet, pålitelighet og muligheten til å sortere i flere fraksjoner samtidig, mens luftdyssystemer gir uovertruffen hastighet for lettere materialer når man kan nøye seg med binær sortering.
I mange tilfeller vil kombinasjonen av begge teknologiene gi det optimale resultatet, der hver manipulatortype brukes til det den er best egnet for.
I neste og siste artikkel i denne serien vil vi se på hvordan du kan komme i gang med robotisert avfallssortering, fra første vurdering til full implementering.
Likte du denne artikkelen?
Du kan abonnere på bloggen vår og få flere artikler som denne rett i innboksen din!